Hi all,
Yet another project on my current list, or two….
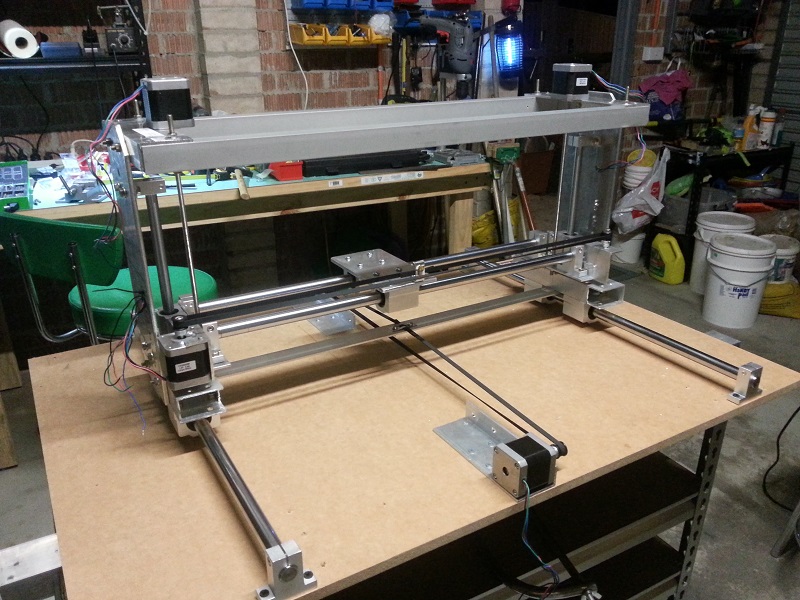
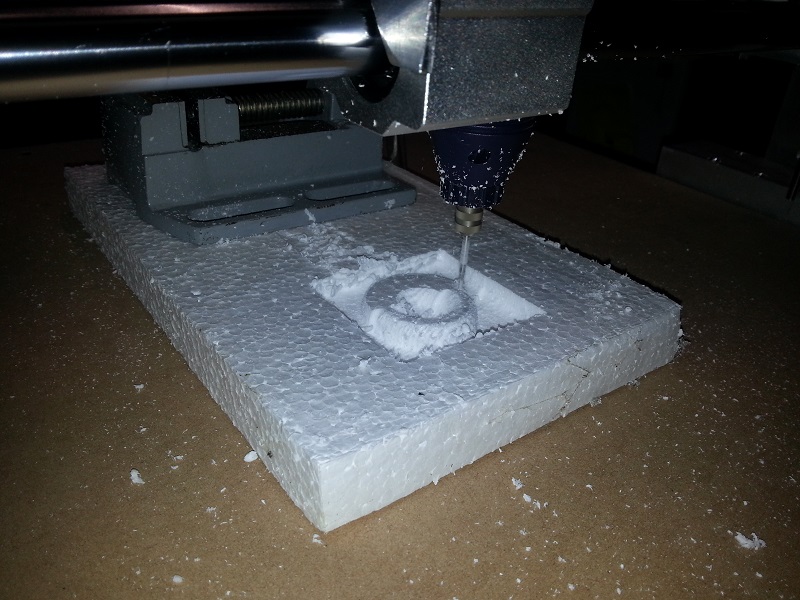
Been building a CNC machine for a hardware project I’ll be working on with a friend. Currently a 3-axis machine controlled by LinuxCNC system, eventually it will accommodate a machining tool, a pick and place tool and an extruder (for 3D Printing). I’ll also be building an embedded stand-alone controller so it can operate independent of the computer.
It will machine parts for me.
it will print parts for me (like new gears for the telescope mount).
and it will build circuit boards for me!
Speaking of the telescope, yes it needs better gears, current ones were hacked together so its not smooth or linear enough for me, also I plan to re-do parts of the code to improve its handling.
I really have too much to do in my spare time, need to win the Lotto so I can work on them full-time… 😛
Anyways, here’s some pretty pictures of the machine until next update 😉